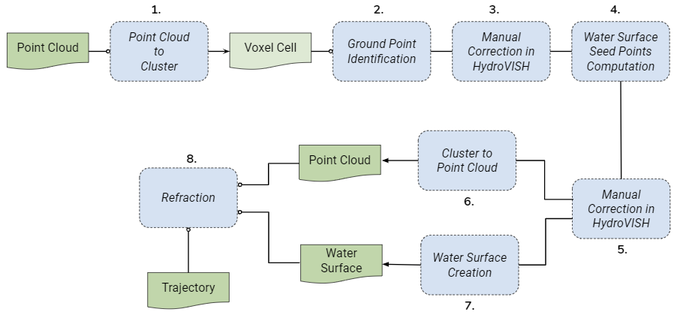
The automatical classification is not done on the point cloud itself but on an clustered point cloud. Therefore the original georeferenced and adjusted strips are merged into one refragmented file. After the point cloud is subdivided into cubic voxel cells with edge length clustersize, and furthermore for each voxel cell a representative point is calculated.
2. Identification and Extraction of Ground Points (Ground Points Identification)
On basis of the clustered point cloud the ground points are extracted: with the help of properties like intensity (or amplitude), return number and number of returns outliers are identified. After that, algorithms like planar regression and alpha shapes remove not ground points and classifies these as such.
3. Manual Correction I: Ground Points
After the automatic identification of ground points it is necessary to have a look on the clustered point cloud. Not ground points which are classified as ground points have to be manually corrected.
4. Water Surface (Compute Water Surface Seed Points)
Having ground points means that now a water surface computation is possible.
5. Manual Correction II: Water Surface Seed Points
Similarily to the ground point classification the automatic computed water surface seed points have to be corrected.
7. Creation of Water Surface (Create Water Surface)
The corrected water surface seed points are together with a perimeter the basis for the creation of the water surface. The water surface is a triangulated mesh and is used for the refraction of the point cloud.
6. Transfer of Classification (Cluster To Point Cloud)
The ground point class is transferred from the clustered file onto the point cloud. The "thickness" of the ground is determined as 15 cm.
